Csapatunkon belül 9 csoport dolgozik, amelyeknek mind megvannak a saját felelősségi körei. Ezen csoportjaink és vezetőségünk összehangolt munkája már számos alkalommal – többek között az utóbbi versenyszezonok során is – sikerre vitte a csapatot.
A Meet the Team koncepciót azzal a céllal álmodtuk meg, hogy közelebb vigyük az olvasót csoportjainkhoz, ezzel együtt pedig csapatunkhoz is. Első szakmai cikkünkben néhány direkt kérdés megválaszolásával Borbély Ádám, a járműdinamika csoport vezetője fog mélyebb betekintés engedni csoportja munkálataiba.
Felvezetésként a járműdinamika csoport fő feladata az autó négykerék-meghajtását szabályozó program fejlesztése, mely több szempontnak is meg kell feleljen: egyrészt “optimális dinamikával” kell irányítani az autót, azaz kipörgésgátlót, nyomatékvektorozást, rajtprogramot és egyéb pilótát segítő funkciókat kell implementálni, másrészt pedig a villamos motorokban rejlő potenciált kell megfelelően kihasználni. A feladatok közé tartozik még a futómű kinematikai tervezése, a futóműbeállítások számítása, az autó dinamikai viselkedését vizsgáló szimulációk elvégzése, illetve a tavaszi és nyári teszt- és versenyszezon alatt keletkező adatok rögzítésének felügyelete, továbbá ezek elemzése.
Járműdinamikai irányítószoftvert fejlesztetek, ez milyen feladatot lát el?
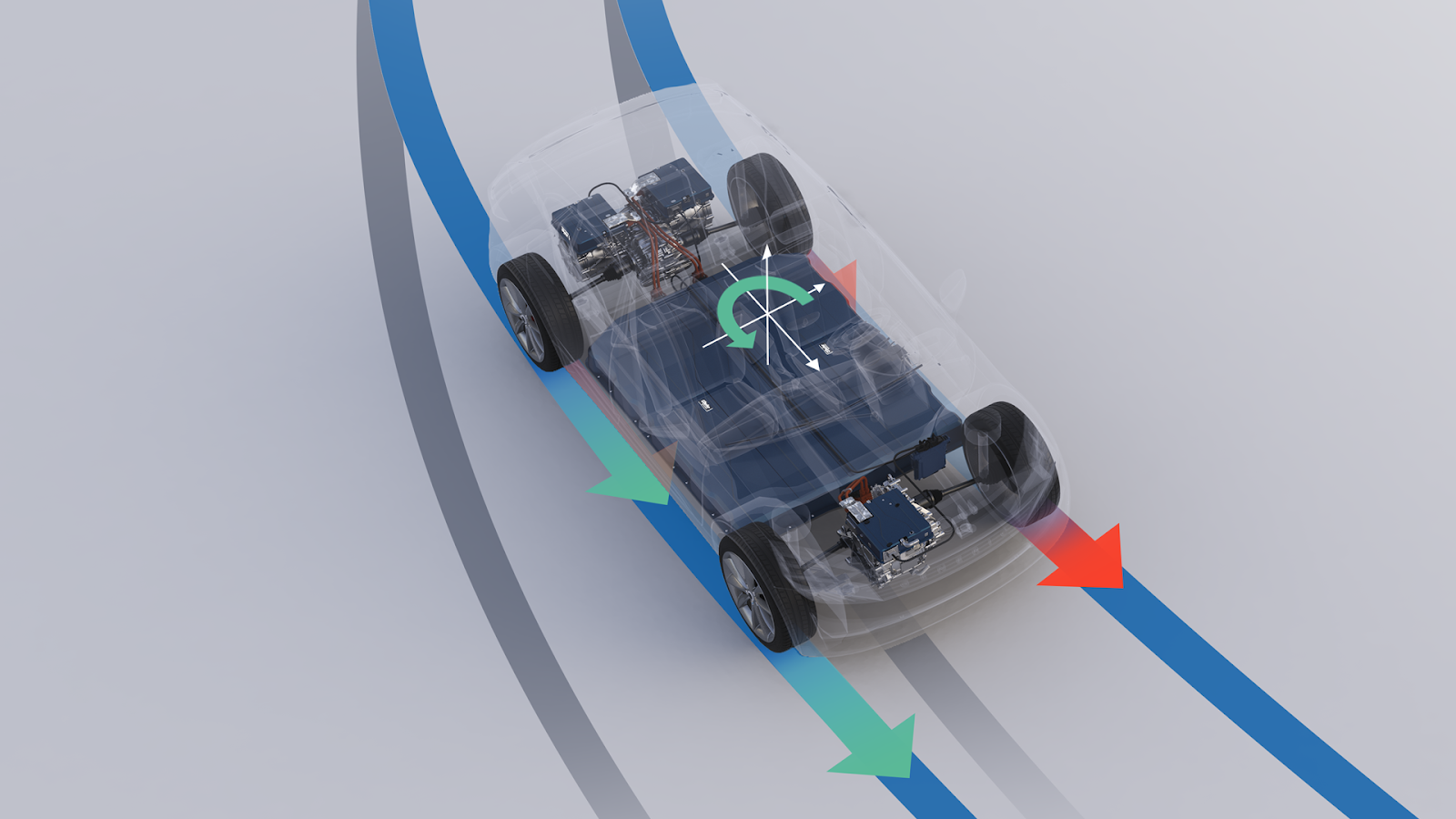
Ádám:A Formula Student versenysorozatban az utóbbi években egyre inkább az elektromos meghajtású autók kerültek előtérbe a belsőégésű motorokkal szemben. Az elektromos autókkal együtt az agymotoros hajtásrendszerek is egyre elterjedtebbé váltak. Az agymotorok alkalmazása lehetővé teszi a független nyomatékszabályozást minden egyes keréken, ami kulcsfontosságú a fejlett nyomatékvektorozás (torque vectoring) megvalósításához. Ez a technológia jelentősen javítja a jármű irányíthatóságát, stabilitását és gyorsulási képességeit, mivel az optimális tapadási viszonyoknak megfelelően lehet szabályozni az egyes kerekekre jutó teljesítményt.
Milyen új funkciókat készítettetek az idei szezonra, illetve milyen fejlesztések voltak a régebbi funkciókon?
Á:A VDC (Vehicle Dynamics Control) szoftver nagyon sok funkciót foglal magába, a rendszer bemenetei az összes szenzor jele, például a gyorsulások, a jármű szögsebessége, a kerekek szögsebessége, a pilóta által a kormányszög és pedálállások, illetve az irányítószoftver beállításai, amelyeket a kormányról lehet állítani.
Ezeknek a jeleknek a felhasználásával több funkciót is megvalósít a VDC szoftver, ezek közül a főbb egységek a következők: – Hosszirányú szabályzás: A cél, hogy a kerekeket szlipjét a megfelelő tartományban tartsuk, hogy ne pörögjenek ki a kerekek. Erre azért van szükség, mert a jelenlegi motorokkal és áttétellel az egyes kerekekre több, mint 300 Nm nyomatékot tudunk kivezérelni, ha ezt nem szabályoznánk, akkor kipörögnének a kerekek, amivel sok időt lehet veszíteni, ez Acceleration és Autocross versenyszámokon számít sokat. – Oldalirányú szabályozás: Ennek célja, hogy a 4 kerékre úgy ossza szét a szoftver a nyomatékokat, hogy éles kanyarokban közben növelje a jármű sebességét, de az autó stabilitását ne rontsa nagy sebességeken. Ezzel lehet kompenzálni az autó alul- vagy túlkormányzottságát adott esetekben. – Teljesítménylimitáló: A szabályzat alapján a nagyfeszültségű akkumulátor nem adhat le 80 kW-nál nagyobb teljesítményt, ez főleg Acceleration versenyszámon szokott előfordulni. A VDC szoftver feladatai közé tartozik, hogy ez ne forduljon elő.
Idén többek között az oldalirányú szabályozón fejlesztettünk sokat, ez egy elég komplex, nehezen számszerűsíthető probléma. Először is a pilóta igényei szerint be kell hangolnunk a jármű oldalirányú mozgását, tehát a jármű szögsebesség válaszát vagy oldalgyorsulás válaszát különböző szituációkban az adott pilótához kell igazítani. Itt nagyon fontos, hogy sok teszt és pilóta visszajelzés alapján megtaláljuk a pilóták számára ideális beállításokat, mivel ez egy túl komplex rendszer ahhoz, hogy objektíven megállapítsuk, mi az optimális beállítás.
Ezt az elvárt oldalirányú mozgást járulékos forgatónyomaték generálásával érhetjük el az autó függőleges tengelye körül. Ez leegyszerűsítve azt jelenti, hogy ha az szeretnénk, hogy az autó jobban forogjon kanyarokban, akkor a külső kerekeket jobban hajtjuk, míg a belsőket kevésbé, ezt nagyon könnyen elérhetjük a négy agymotor segítségével, viszont ha egy stabil és pontos rendszert szeretnénk, akkor ezen nyomaték-különbségek kiszámításához fejlett szabályozásra van szükségünk.
Mennyi időt javít a köridőkön a nyomatékvektorozás?
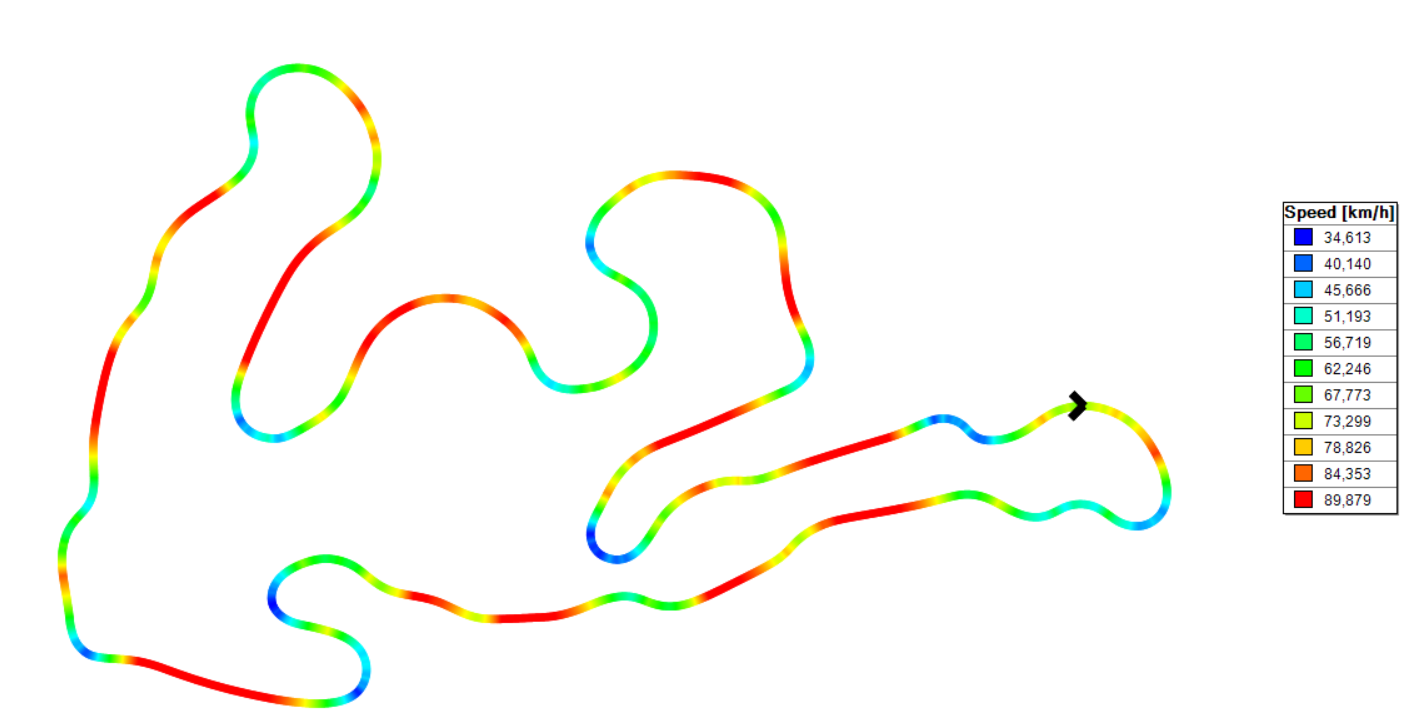
Á: Ez nagyon pályafüggő, de mivel a kigyorsításoknál, féktávoknál és hajtűkanyarokban is tud segíteni a VDC, ezért összességében elmondható, hogy minden esetben javít a szoftver a köridőkön. Egy átlagos, lenti ábrán látható Formula Student Autocross pályán sok szimuláció futtatása és valós tesztek alapján egy 50-55 másodperces pályán nagyjából 3 másodperces (5%-os) javulás érhető el, ami rengeteget számít.
Hogyan fejlesztitek ezt a szoftvert?
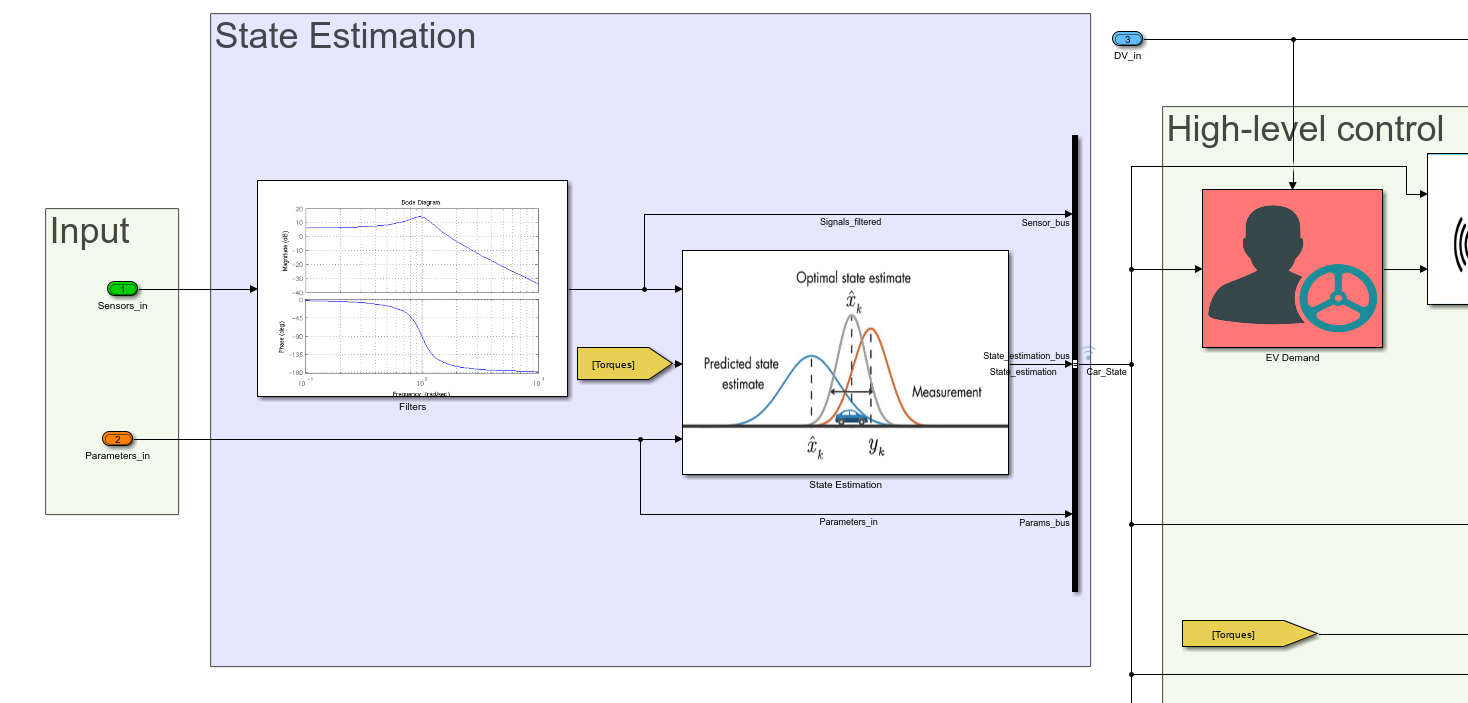
Á: Magát az irányítószoftvert és a szimulációk nagy részét MATLAB/Simulink környezetben fejlesztjük, mivel ez a környezet nagyon egyszerűen használható ilyen mérnöki problémák megoldására. A Simulink különösen hasznos dinamikus rendszerek modellezésére, szimulációjára és vezérlési algoritmusok fejlesztésére. Blokkdiagram-alapú megközelítése intuitívvá teszi a komplex rendszerek vizualizálását, miközben támogatja a MATLAB-alapú szkriptelést és az automatizált kódgenerálást is. Ezáltal ipari és akadémiai környezetben egyaránt elterjedt eszköz a beágyazott rendszerek fejlesztésében és tesztelésében. Ez fontos a csoport számára, mivel az új tagok is sokkal könnyebben megbarátkoznak a szoftverrel így, ami felgyorsítja a fejlesztést.
A fejlesztés V-modell szerint történik, minden egyes funkciót és nagyobb rendszert tesztelünk még szimulációk során, mivel a legrosszabb körülmények között is megbízhatóan kell működnie a szoftvernek. Mivel ez a szoftver felelős a motoroktól kikért nyomatékokért, ezért ez egy biztonságkritikus rendszernek minősül, ezért C kódot generálunk belőle, és egy mikrovezérlőn fut az autón, ezért beágyazott rendszerek programozásához is érteni kell a rendszer működtetéséhez.